Task 3.1 : Equestrianism
3.1.[1-7].2
2022
Biomechanical Equestrian simulation data download
Preparation
- Download & Install Blender 2.8- from here.
- Download the movement modeling data of Jump
- Download the movement modeling data of Gallop
- Integrated movement
- Head movement
- Spine movement
- Tail movement
- Shoulder movement
- Ilium movement
- Upper forelimb movement
- Upper hindlimb movement
- Lower forelimb movement
- Lower hindlimb movement
- Sacrum movement
- Download the movement modeling data of Canter
- Integrated movement
- Head movement
- Shoulder movement
- Ilium movement
- Upper forelimb movement
- Upper hindlimb movement
- Lower forelimb movement
- Lower hindlimb movement
- Download the movement modeling data of Trot
- Download the movement modeling data of Pace
- Integrated movement
- Head movement
- Spine movement
- Tail movement
- Ilium movement
- Upper forelimb movement
- Upper hindlimb movement
- Download the movement modeling data of Stepping Pace
- Integrated movement
- Head movement
- Spine movement
- Tail movement
- Shoulder movement
- Ilium movement
- Upper forelimb movement
- Upper hindlimb movement
- Lower forelimb movement
- Lower hindlimb movement
- Download the movement modeling data of Walk
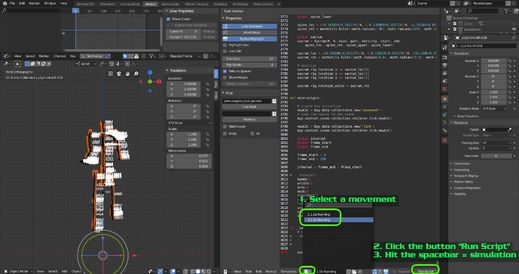
- Select a movement
- Click the button "Run Script"
- Hit the spacebar = Simulation
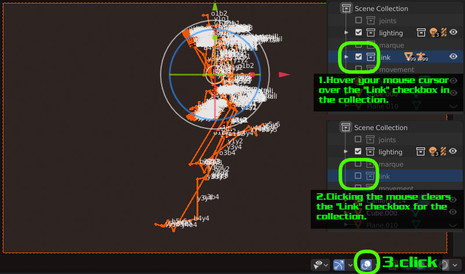
- Hover your mouse cursor over the "Link" checkbox in the collection.
- Clicking the mouse clears the "Link" checkbox for the collection.
- Real-time simulation is possible.