2023
15
A
Z
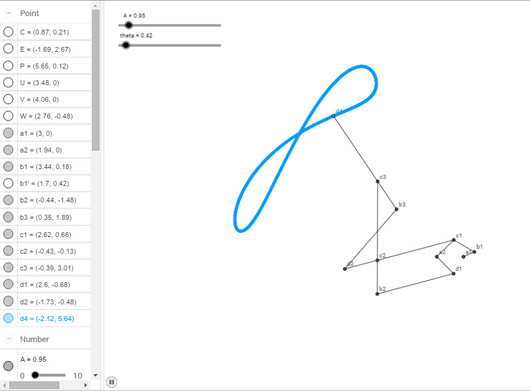
Task 6.1 : The formula
2023
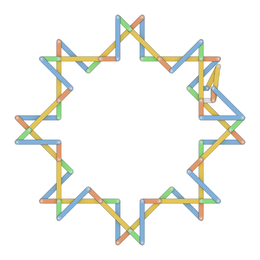
Task 6.2 : The octagonal formula
2018
Task 6.5 : The diamond rhombus configuration
2016
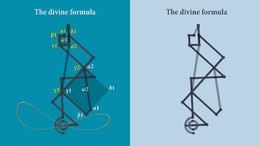
Task 6.1a : The divine formula
2016
Task 6.4 : Flow of trigonometric functions
2015
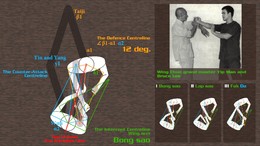
Task 6.3 : Method using the Inverse kinematics
2015
ACCUEIL
INTRODUCTION
THEOREM
Holistic work plan
Work Plan 1. The universal mechanical linkage for the voluntary movement
Work Plan 2. Biomechanical simulation of humans
Work Plan 3. Biomechanical simulation of multi legs
Work Plan 4. Biomechanical simulation of fishes
Work Plan 5. Biomechanical simulation of birds
Work Plan 6. The formula of the voluntary movement
Work Plan 7. Biomechanical simulation of serpents
Work Plan 8. Biomechanical simulation of fins in fishes
Work Plan 9. Biomechanical simulation of divine flight
Work Plan 10. Biomechanical simulation of molecular machines
Bibliotheque
Laboratoire
© 2026
VARIPON
presented by Madfolio
Sign In