Task 6.3 : Method using the Inverse kinematics
2015
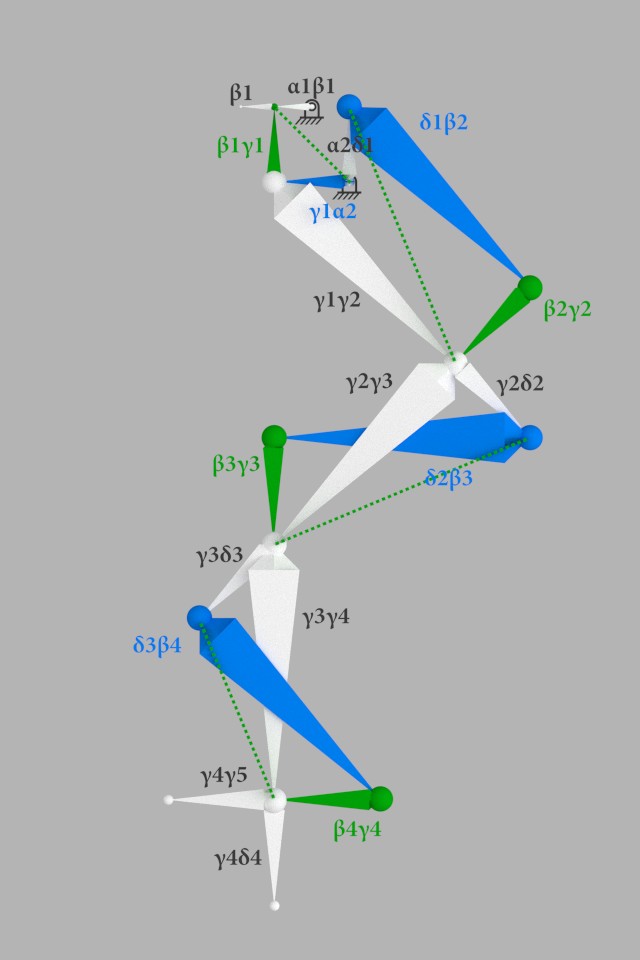
// __ method using the IK __
Bone : α1β1
Parent : N/A
Bone : β1
Parent : α1β1
Bone : β1γ1
Parent : γ1α2
IK : Bone : β1
Limbs Number : 2
Bone : γ1α2
Parent : N/A
Bone : α2δ1
Parent : γ1α2
Bone : γ1γ2
Parent : β1γ1
Bone : δ1β2
Prent : α2δ1
Bone : β2γ2
Parent : δ1β2
IK : Bone : γ2δ2
Limbs Number : 2
Bone : γ2δ2
Parent : γ1γ2
Bone : γ2γ3
Parent : β2γ2
Bone : δ2β3
Parent : γ2δ2
Bone : β3γ3
Parent : δ2β3
IK : Bone : γ3δ3
Limbs Number : 2
Bone : γ3δ3
Parent : γ2γ3
Bone : γ3γ4
Parent : β3γ3
Bone : δ3β4
Parent : γ3δ3
Bone : β4γ4
Parent : δ3β4
IK : Bone : γ4δ4
Limbs Number : 2
Bone : γ4δ4
Parent : γ3γ4
Bone : γ4γ5
Parent : β4γ4
…
n > 1
Bone : γ(n)γ(n+1)
Parent : β(n)γ(n)
Bone : δ(n)β(n+1)
Parent : γ(n)δ(n)
Bone : β(n+1)γ(n+1)
Parent : δ(n)β(n+1)
IK : Bone : γ(n+1)δ(n+1)
Limbs Number : 2
Bone : γ(n+1)δ(n+1)
Parent : γ(n)γ(n+1)
We have seen that is very hard to calculate a relational position of each joint in the trigonometric functions.
In order to intuitively design a linkage mechanism, I have already completed some new techniques. It is possible to flexible and quick 3D design. From this reason, no need exceptional program.
There is some standard technologies which equipped by 3DCG animation application softwares (like Blender or 3dsMax).
- Bones and Skeletons
- Inverse Kinematics
- Constraints
Using the techniques described above, We easily simulation of linkage mechanism can be. This is a idea of reversing the normal usage.
In this way, by the theorem that I have completed, it will be straightforward to design a complete kinetic mechanism. adding the fluctuation, incomplete movements also be able to design. (such as drunken staggering gait)
So, as a more intuitive approach, advantage of IK, there is a function given the value of stretch to the joint. this elongation margin lead us to a lot of opportunity for discovery.